作者:聂慧荃 合伙人、质检部经理、资深专利代理人
针对创造性理由的论辩,往往是专利无效案件中双方博弈的关键。如何从涉案专利及相应证据的繁杂公开内容里抽丝剥茧、见微知著,找到论辩的突破口来辅证自身观点,既是对案件双方代理人业务能力的考验,也是关乎案件成败的焦点所在。
实践中,代理人一般是借助于三步法或者创造性判断的辅助因素来进行创造性论述,基于自身的经验和案件的特性,大家寻求创造性论辩突破口的方式各有不同。笔者认为,从技术细节/技术效果出发,尤其是附图,来寻求创造性答辩的突破口也是一种比较便捷的途径。
具体而言,当比对涉案专利与证据所公开的技术方案时,在整体考量各自技术方案的基础上,重视两者在技术细节或技术效果上的差异,建立这种技术细节或效果上的差异与技术方案的差异之间的联系,即先寻找两者在技术细节或效果上的差异,再回看这种差异是缘何产生,又如何体现在完整技术方案中,从差异回归到整个技术方案中的某些特征,这有时会使创造性论辩取得事半功倍的效果。而所谓差异,可能体现于两者文字记载的差异,可能体现于附图所示内容的差异。
下面将以笔者代理的实际案例来说明如何从附图出发,寻求创造性论辩的突破口。
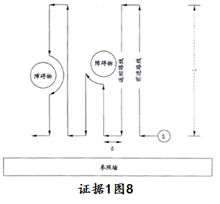
在“智能吸尘器控制系统”实用新型专利无效案(第27999号无效宣告请求审查决定)中,我们作为专利权人乐金电子(天津)电器有限公司的代表。无效请求人指出,证据1吸尘器为了避开障碍物需要进行旋转,且从证据1的图8中可以看出其旋转的角度需要根据障碍物的形状进行调整,因此证据1公开了涉案专利吸尘器的争议特征。
第一,寻找证据1和涉案专利在技术细节上的差异
尽管证据1图8所示的方案貌似与涉案专利非常相近,但我们在仔细研读证据1后,从证据1的附图4中发现,证据1中吸尘器的清扫路线实际上与涉案专利的清扫路线存在细微差别。如下图所示:

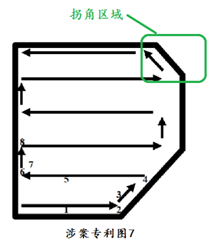
证据图4中的粗黑实线代表清扫路线;而涉案专利附图7中的粗黑实线代表墙壁(即障碍物),由箭头线形成的折线路径即为清扫路线。通过比较两附图不难看出,证据1图4中所示厨房的拐角区域处,吸尘器的清扫路线仍然是成90度转向的路线;而涉案专利中吸尘器的清扫路线随着墙壁而变化,其在拐角处的清扫路线沿循着墙壁的走向。因此,附图所示的拐角区域处清扫路线的不同即为证据1和涉案专利在技术细节上的差异,就技术效果而言,证据1所公开的方案只能实现对规则区域的清扫,而不能像涉案专利中那样,实现对不规则区域的完全清扫。
第二,明确技术细节差异在证据1和涉案专利各自整体技术方案上的体现
这种技术细节差异反映到他们各自的整体技术方案上,就体现在吸尘器的控制系统在探测到障碍物后如何控制吸尘器旋转上的不同。这种技术细节的差异推动我们去寻求两吸尘器在旋转控制上的不同。
在涉案专利所要保护的方案中,在探测到障碍物时,智能控制模块一方面发出两组一定频率的脉冲信号来驱动左右轮子电机旋转,另一方面依据障碍物与行进路径之间的关系控制吸尘器旋转,边旋转边读取障碍检测模块的值和角度传感器的测量值,直到障碍检测模块确认前方无障碍物时才停止输出脉冲信号,使吸尘器停止旋转。由于智能控制模块在控制吸尘器旋转时需要实时考虑障碍物与吸尘器行进路径的关系(即二者所成的角度),所以本专利的吸尘器能够实现对不规则区域的完全清扫。
证据1中的吸尘器基于允许其沿着待清洁区域的轮廓行进的沿墙技术来清洁待清洁区域。工作时,吸尘器先选择参照墙(此时参照墙可视为“障碍物”),再按之字形进行图案运动,即:吸尘器相对于选定的参照墙反复行进规定距离L,再旋转,无论前方是否有障碍物,吸尘器行走达距离L后就会旋转固定角度90度,再走间隔d,然后再旋转固定角度90度后行进规定距离L……。此时,吸尘器是依据“控制器确定吸尘器是否已完成预定距离L的运动”来转向的,与障碍物(“参照墙”)的情况无关。
证据1的吸尘器如果在行进距离L的过程中遇到小障碍物,如图8所示,吸尘器根据基于右侧的方法旋转来避开障碍物;旋转时,障碍物始终在吸尘器右侧,算法通过软件预先确定到障碍物的距离,机器人吸尘器基于该距离避开障碍物,通过反馈控制方法保持到障碍物的距离不变,该反馈控制方法基于由障碍物探测器测量的距离控制轮子速度。在这种情况下,控制器是根据“保证距障碍物预定距离的方式”来控制吸尘器的旋转以避开障碍物,证据1中的吸尘器是边走边转直到探测不到障碍物。
结合以上分析可知,证据1中是选定规则区域执行清扫,没有考虑斜角的清扫问题,这从证据1的图4可以得到客观证明;而从其图8中的清扫路线可以确定吸尘器是以保持其到障碍物预定距离的方式来行进以避开障碍物的。而涉案专利中,吸尘器是根据障碍物与行进路径之间的关系(即二者所成的角度)来控制吸尘器的旋转,实现对不规则清扫区域的完全清扫。由此可见,尽管证据1和涉案专利的吸尘器在遇到障碍物后都会受控而旋转,但控制旋转所基于的对象全然不同。如此一来,我们就从两者在附图中的细微差异看到了他们在整体技术构思上的实质性不同。
第三,发现整体技术构思上的设置不同与技术特征的关联
证据1和涉案专利两者整体技术构思上的这种实质性不同,自然会与某些技术特征相关联,具体到本案,这种差异就体现在涉案权利要求所限定的智能处理模块获取角度α的检测步骤上。至此,我们就建立了技术细节差异与技术方案差异之间的联系,完成了从证据1/涉案专利的附图出发到创造性论辩突破口的发掘。
于是,在创造性论辩中,我们就可以以前述内容为突破口,更准确地从证据1和涉案专利技术方案整体来理解相关技术特征的作用,从其技术方案的整体构思的差异来挖掘二者的区别。特别是,证据1不涉及根据障碍物与吸尘器的行进路线所成的实际角度来实时控制吸尘器旋转实现对不规则区域完全清扫的技术构思,而在本专利中,障碍探测模块、角度感应模块、智能控制模块三者之间相辅相成,智能控制模块在障碍探测模块探测到障碍物时,能够给予所接收到的来自障碍探测模块和角度感应模块两者的控制信号,能够实时考虑障碍物与吸尘器行进路线之间的关系,利用脉冲信号来快速、精确地控制吸尘器的旋转角度,使吸尘器的最终行走路线与证据1存在明显不同,这显然不属于公知常识的范畴。
综上,我们从附图出发,找到了证据1和涉案专利中结构关系类似的部件在各自技术方案中发挥作用的实质不同;籍由附图中直观示出的差异,我们可以充分论证他们在整体技术构思、工作方式、技术效果上的不同。这种寻求创造性突破口的方法,在证据公开的方案与涉案专利较为相近的情况下,往往能够很好地指引我们从整体技术构思上来发现区别,使我们独辟蹊径找到所需要的支持点,有利地补强我们的创造性论辩。